
随着自动化焊接工艺的发展,需要持续监控关键焊接参数,以验证输入参数是否得到优化,并实现了最佳质量的焊接。长期以来,制造商一直依靠放置在焊源附近的合格焊接人员来直接可视化正在发生的事情并监控焊接过程。然而,更高效、质量更好的解决方案是在自动化焊接过程中引入焊接相机。
焊缝监控摄像机是一种使能技术,已应用于各种硬质和柔性焊接自动化应用。当放置在工艺附近时,焊接相机可以捕获焊接的细节及其直接环境。这使焊接操作员能够监控过程,帮助引导焊接自动化或管理材料输入,同时从焊源的直接附近移除。经验表明,在工艺中安装焊接相机可以为操作员带来显著的健康和安全效益,并提高焊接工艺的生产率。焊接监控摄像机正在成为硬质和柔性自动焊接工艺的必要组件。
用于硬自动化的焊接相机
纵向焊接封口机
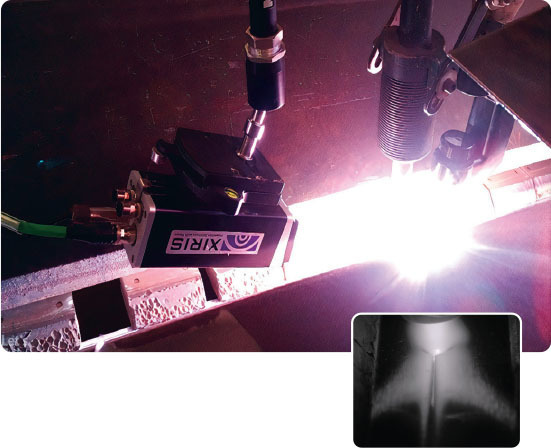
纵向缝焊是一种有益的工艺,旨在将管道或两个平板的两侧连接在一起,而无需对准备中的材料进行任何点焊。焊接头沿封口机的长度行进以进行内部或外部焊接,封口机将材料固定在一起并重复连接两侧以形成圆柱体或板。虽然使用纵向封口机有助于产生精确一致的焊缝,但它仍然需要操作员监控焊枪对准过程或焊缝质量,以确保一致和高质量的结果。封口机通常用于制造大型储罐、压力容器和其他大型壁管或大直径管道。这意味着,如果不使用焊接相机,操作员通常必须从远处观察过程,因为封口机可能相当长且繁琐,操作员可以在过程附近进行监控。
焊盘摄像机可以安装在焊枪前面的纵向焊缝机上,以查看焊枪与焊缝的对齐情况;或在焊枪后监测焊缝质量和焊缝的形成。
安装在封焊机上的焊接摄像机。
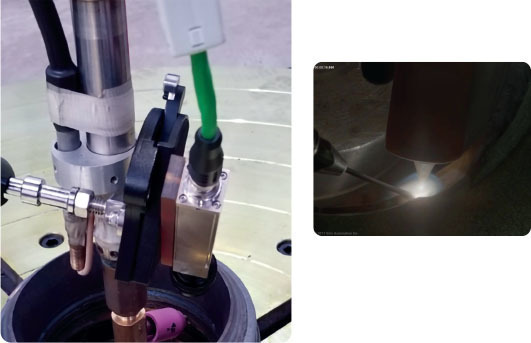
窄坡口焊机
在过去的几年中,窄坡口钨极气体保护焊(GTAW)已发展成为发电厂建设和维修以及涡轮机械组装和维修中最具生产力的管道焊接技术。由于发电厂对工作温度的要求越来越高,现在要求管道具有更大的壁厚和耐压性,以承受增加的温度和压力。更大的壁厚推动了对更高效、更实惠的焊接技术的需求,而不会影响质量。窄坡口焊接最符合这一需求,因为它需要更少的填充材料和完成焊接的时间。窄坡口焊接头可以伸入深槽并执行通常无法实现的焊接。
焊枪和焊枪前缘的送丝机之间可以放置一个焊接摄像机,以最好地显示焊接过程和参数。
焊接摄像机安装在窄坡口焊机上。
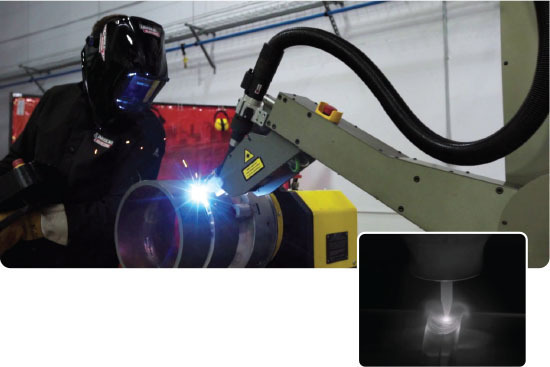
轨道焊接
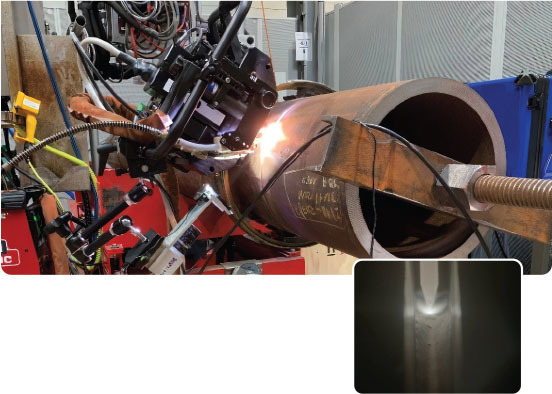
对于任何尺寸的管道或管子,轨道焊接系统使用焊接电弧,该焊接弧沿着圆周焊缝围绕静态工件的外围机械旋转 360°。GTAW是轨道焊接的首选焊接工艺,用于进行精确的焊接,无论是否包括填充焊丝。当连接较厚的壁管时,可以使用半自动焊接工艺在每个焊缝上进行多次走道。虽然轨道焊接系统可以帮助手动焊工从狭窄或危险的焊接环境中移除,但该过程仍必须由操作员监控,以确保其焊接输入参数得到适当优化并实现高质量的焊接。
焊枪前缘的焊枪和送丝机之间可以安装焊接摄像机,以获得最佳过程视图。
安装在轨道焊接系统上的焊接摄像机。

立柱和动臂机器人
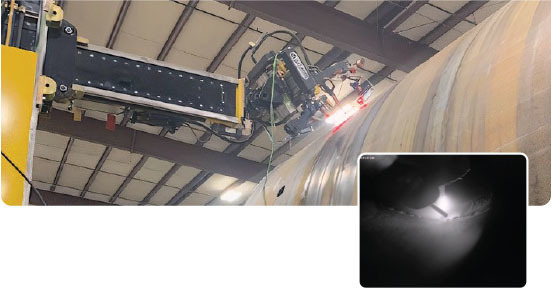
立柱和动臂机器人是一种特殊的机械手,用于提供具有高伸展性和提升力的坚固焊接自动化解决方案。设置中包括一个称为立柱的垂直主轴和一个称为动臂的主轴水平轴,以及可选的臂端工具,其中可能包括其他轴和焊枪。立柱和动臂机器人可用于伸入或绕过大型圆形物体,例如大型管段或压力容器,以执行圆形焊缝的内部和外部通道或内/外熔覆操作。为了确保工艺稳定性,操作员仍然需要能够监控焊接情况,以确保各种参数符合规格,例如:焊枪相对于焊缝的对齐方式,保护气体是否正确流动以正确覆盖焊弧,或者焊枪到基体的高度是否在位置限制范围内。
焊接相机可以以任何角度放置在机器人上,例如从相机可见焊缝大部分特征的侧面安装。
焊接摄像机安装在立柱上,动臂机器人执行焊接,而操作员则监控下方的视频馈送。
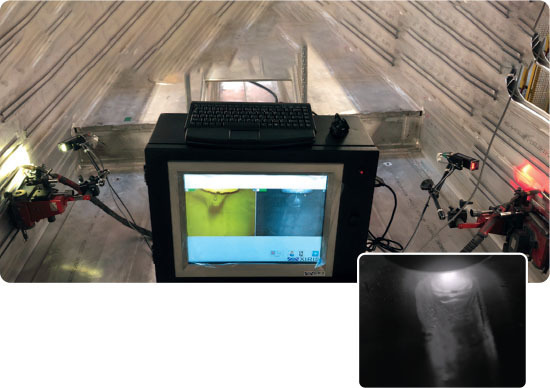
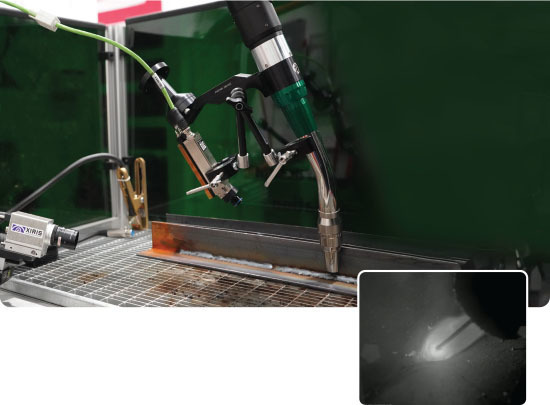
安装在焊接拖拉机上的两台焊接摄像机;一个单色,一个彩色。
焊接拖拉机
大板的连接通常使用称为焊接拖拉机的特殊电动装置完成。通常,拖拉机在携带焊枪时将遵循轨道或导轨,并使用操纵杆远程操作以焊接船舶、压力容器、大型板段和其他地方的长缝。在完成焊接通道后,推土机也可以轻松地从一个焊接工艺转移到另一个焊接工艺。但是,要将拖拉机完全实施为焊接自动化过程,应在焊接拖拉机上安装焊接摄像机,以便操作员远程监控该过程。
焊接摄像机可以直接安装在焊机上,无论是在焊枪之前还是之后,以监控长焊缝沿焊接过程,因为它会随着拖拉机移动。
安装在堆焊自动化系统上的焊接摄像机。
堆焊工艺
堆焊或熔覆工艺用于将一层薄薄的耐腐蚀或耐磨材料(如镍或钛合金、难熔金属、不锈钢等)焊接到基材上。覆盖材料通常是一种非常坚硬的材料,以粉末或金属丝的形式应用。堆焊是一种更具成本效益的解决方案,因为它为基础产品提供了上述保护,而不必用较硬的材料构建整个产品。堆焊/熔覆工艺通常在困难或危险的焊接条件下进行,操作员能够远程监控工艺并进行现场调整。
无论堆焊过程使用机器人还是龙门自动化,都可以在焊枪臂上安装焊接摄像机,以提供该过程的特写视图。
灵活的自动化示例
阀芯焊接机器人
线轴焊接机器人专门设计用于管段、小型压力容器和其他类型的辊焊产品的连续焊接,这些产品可以在工厂焊接,然后再运送给最终用户,安装阀芯可以节省大量时间安装单独的部件。线轴焊接机器人使制造商能够在异地更快地构建管线轴。为了充分利用线轴焊接机器人,制造商应将焊接摄像头集成到他们的设备中,以使操作员能够实时连续监控焊接过程。
焊接摄像机可以直接安装在线轴焊接机器人的焊枪臂上,使操作员能够远程监控焊接过程。
一个正在操作的线轴焊接机器人,由Novarc Technologies提供。
多轴铰接式机器人
多轴铰接式机器人由具有五到七个轴的全铰接机器人组成,在沿着复杂或难以到达的焊接点移动焊枪时提供最大的灵活性。机器人被编程为在端点之间尽可能平稳地移动,并且可以改变速度以适应焊接过程。当使用高度一致的焊接工艺并在焊缝周围留出足够的空间时,它们是一种经济有效的替代手动焊接工艺的方法。它们通常构成自动焊接单元的基础,机器人在其中对从其他自动化组件交付给它的零件进行焊接。
焊接相机可以帮助最大限度地发挥在自动焊接单元中使用多轴铰接式机器人的优势。当安装在机器人手臂上时,它可以提供操作员难以看到的自动化焊接过程的视图。
安装在多轴铰接式机器人上的焊接相机。

焊接协作机器人
焊接协作机器人是一种快速且易于编程的机器人类型,可与人类一起安全地工作。操作员手动移动机器人手臂和割炬通过焊接零件所需的程序路径。它们为未经培训的操作员提供了一种快速方法,可以轻松地对机器人进行编程,并且可以执行比手动焊工更长的连续焊接。焊接协作机器人是多品种、小批量生产的理想选择,可以为操作带来显著的好处,当与焊接相机结合使用时,可以进一步增强。
设置了两个焊接相机来捕获协作机器人执行的焊接。
总结
无论是用于硬质自动化还是柔性自动化,Xiris焊缝监控摄像机都是一种使能技术,有助于提高焊接自动化提供的有效性和生产率。
焊接相机可实现更高水平的工艺和质量控制,有助于实现一致和高质量的焊接,同时降低维修和报废成本或与健康和安全相关的成本。在几乎任何焊接自动化过程中,操作员都可以使用焊接摄像机清楚地看到焊接过程的所有细节,这些细节是使用焊接头盔直接观察技术无法看到的。
